I like to make and do things that challenge my creativity, knowledge, and intellect.
Welcome to the Schlab.
Saturday, January 1, 2011
Schlembot Motor Test and Excellent Power Supply
After weeks of fiddling around with building a VEX-based drive system for the robot, its power supply, Pololu interface, the servo and the case for the Ping))) module, and just generally thinking about the Schlembot (not to mention The Holidays, and 417duino prototyping)... it's time to write some Arduino code and make some shit happen. This is a basic forward / backwards loop, just to monkey with motor speed and equalization. It seems the right motor has a little more torque for some reason and kicks the whole robot to the left when going forward or reverse. I think I can compensate for that by increasing the left motor speed by a tiny bit. The servo wants to jerk around a little bit from line noise in the 5V power supply, so I put in some purposeful code to make the servo scan left-center-right. The Ping module in the rotating project case isn't doing anything useful at the moment, just going along for a ride.
I used my DroidX camcorder app to take this video - it's like 49MB in size. Crazy.
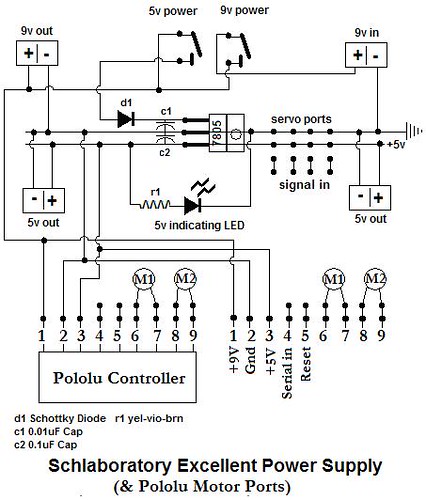
Below is the latest incarnation of the Schlaboratory Power Supply, incorporating Pololu motor control on the good old Radio Shack 276-150 PCB. 417, natch. I used this power supply with my lego / Basic Stamp robots and it performed very well. It has integral ports for powering servo motors and supplying a logic control signal. Vin could be anything between 7 and 20 (some say 35) volts. I'm using a six-pack of 1.5V C cells to provide a nominal 9V. 9V out to Arduino module (which has its own on-board voltage regulator), the 5V from this power supply is for Pololu logic power, servos, and the breadboard. The 7805 voltage regulator wastes the excess voltage as heat, but is simpler to implement than a switching regulator. Good enough compromise for my nefarious purposes.
No comments:
Post a Comment