I spent some Christmas money on an obviously named "Rootooth" (A Bluetooth interface for the Roomba) from RoombaDevTools.com, only to be frustrated by a lack of documentation (and, admittedly, knowledge on my part). The Rootooth works to a point - the point at which you pair it with your other Bluetooth device (Tried with my Desktop computer and DroidX). The various documentation states that the passkey for pairing is "default", but may also be "1234" or "0000". So far, in repeated trials, none work. I am now trying lottery numbers and birthdays. Arrrgh.
I spent some Christmas money on an obviously named "Rootooth" (A Bluetooth interface for the Roomba) from RoombaDevTools.com, only to be frustrated by a lack of documentation (and, admittedly, knowledge on my part). The Rootooth works to a point - the point at which you pair it with your other Bluetooth device (Tried with my Desktop computer and DroidX). The various documentation states that the passkey for pairing is "default", but may also be "1234" or "0000". So far, in repeated trials, none work. I am now trying lottery numbers and birthdays. Arrrgh. I did forgo setting up a hardwired serial connection in the interest of expediency. Mini DIN 8/7 pin cables are slightly difficult to find (the Apple store has them, but wants $25-30.00 for them!!! CompUSA has them for $2.00 each). I am waiting on my shipment from CompUSA. And so waits the serial connection troubleshooting that they will allow. Arrrgh.
Also come to light is that the 500 series Roombas implement a different (expanded?) version of the Roomba Open Interface (ROI, formerly Serial Communication Interface - SCI). Which implies that the 400 series Roomba (Fun Gus) I have been trying to interface with the Rootooth may utilize a retarded version of the ROI. Much of what has been written about "Hacking Roomba" is several years old, and iRobot seems to have abandoned online support of the ROI for consumer Roomba (Roombas? Roombi?), in lieu of pushing the experimenter / hacker to the Roomba Create. Arrrgh.
As I have mentioned, my Roomba 530 (Dirty Gertie) is smarter and faster, while my Romba 400 (Fun Gus) is more brutish in its approach. Even though Gus sports an IR detector on the top of his bumper like all Roomba, he seemingly ignores Virtual Walls and gets stuck in a couple of spots around the house. As to the Rootooth, it receives power when plugged in, but I am not confident that the serial connection is patent. Where are those serial cables? Arrrgh.
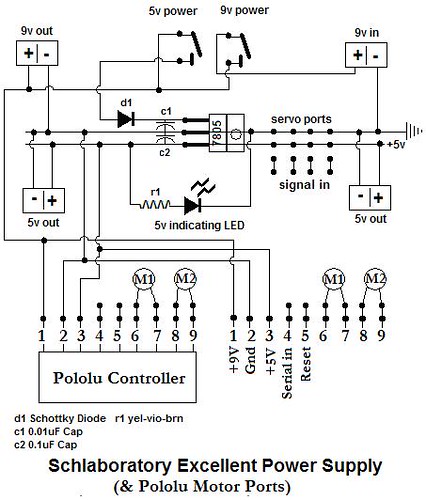
 I haven't touched the Schlembot in a few days. There is some glitch in the "TurnCounterClockWise" routine that interfaces with the Pololu serial motor controller. Maybe some time and distance will provide clarity when next I bang on it. Arrrgh.
I haven't touched the Schlembot in a few days. There is some glitch in the "TurnCounterClockWise" routine that interfaces with the Pololu serial motor controller. Maybe some time and distance will provide clarity when next I bang on it. Arrrgh. But, as I type this, Gertie and Gus are dervishing on the floor, sucking and sweeping up the detritis of our domesticity, doing what they were (primarily) designed to do, and doing it well. And that pleases me.